2024 로봇경진대회 - 미션투마스를 준비하는 과정에서 느꼈던 것을 정리하고, 추후 이 대회에 참가 분들에 도움이 되기를 바라며 글을 작성하였다. 🖊️
참가 계기
2024년 8월 동욱이가 "로봇경진대회 - 미션투마스"에 대해서 알려줬다
4주 후에 벡스코에서 여는 규모있는 대회였는데, 자세히 알아보니
총 참가자가 8명이고, 작년 대회 수상자가 총 8명이였다
무조건 수상 할 수 있다 생각으로 대회에 참가했다
1일차
대회 규칙에 대해 자세히 살펴보자
1. 차체 사이즈는 25cm x _25cm x 25cm 이하여야 한다_
2. 10cm 높이의 계단 2개를 넘어 상대 진영으로 넘어가야 한다
우리는 로봇 팔과 같은 바퀴 이외의 요소로 계단을 오르지 않을 것이기 때문에
계단을 수월하게 올라갈 수 있도록 바퀴 사이즈를 24cm으로 정했다
바퀴 형태는 이를 기준으로 정하였다
-
간단한 형태인가
-
3D 프린터로 뽑을 수 있는가

이에 모두 부합하는 삼각별 형태 바퀴로 정하였다
4. 상대 진영의 30mm x 6mm 짜리 원판을 뒤집어 점수를 획득한다

처음에 저희는 차체에 모터를 하나 더 달아서
뒤집개로 원판을 뒤집을 수 있다 생각했다
하지만 바퀴의 모양이 삼각형이라
움직일 때 차체 높이가 계속 달라져서
뒤집개를 정확히 바닥에 맞추는 것이
어려울 것이라 판단하였다
그래서 저희는 차체에 따로 모터를 달지 않고
바퀴에 양면테이프를 붙여 원판을 뒤집는 방식으로 정하였다
2~3일차
바퀴의 모델링을 진행했다
이 설계가 무게 부하를 분산하고
계단을 올라갈 때 지면을 잘 잡아줄 수 있을 것이라 생각해
이런 디자인을 선택했다
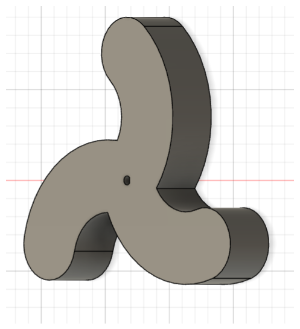
바퀴 디자인을 완료하고 3D 프린터에 출력을 시켰다
또한 MCU, 모터와 모터 드라이버를 정했다.
MCU는 빨리 만들 수 있는 아두이노를 사용했다
모터는 계단을 오를 정도로 강한 토크가 필요하기 때문에 스테핑 모터를 사용했다
모터 드라이버는 스테핑 모터에 맞는 A4899를 사용했다
4일차
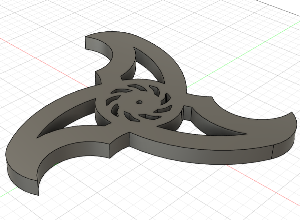
바퀴가 출력된 걸 보니 두께가 너무 두껍고, 계단을 오르기에 끝 부분이 너무 뭉툭하다는 생각이 들었다.
또한 프린팅 해야하는 면적이 너무 넒어 프린팅 시간이 오래걸린다는 단점이 있었다
이런 단점을 보완한 V2 디자인을 완성했다
5일차
대회 규칙 중
1. 통신 방식은 무선으로 한다
라는 규칙이 있다
여러 무선 통신 방법(적외선, 블루투스, Wifi) 중 적외선을 사용하였다
대회 2일전 밤 9시쯤, 동욱이한테 모터 토크가 부족해서 바퀴가 돌아가지 않는다는 얘기를 들었다
평지에서도 돌아가지 않아서 계단을 올라갈 수 있을 리가 없었고 저희는 지레짐작으로 실격을 생각하고 있었다..
대회 당일
대회 당일까지 저는 적외선 통신으로 로봇을 구동시키지 못해서 참가하기가 싫었다
그래도 일요일에 벡스코까지 갔으니까 자료수집이라도 할겸 대회 장소로 이동했다
진행자분께 로봇 미완성을 미리 말씀드리고 저희는 대회에서 실격 하게 됬다.(미완성이라 참가할 수 없음)
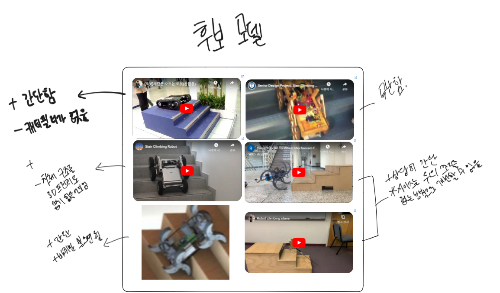
다른 참가자는 어떤 형태로 로봇을 만들었을지 궁금해서 주변을 둘러봤는데
우리 둘을 제외한 나머지 5명(한명 불참)이 전부 똑같은 형태의 로봇을 가지고 있었다.
로보티즈를 써서 만든 것 같던데 형태까지 완전 똑같은 것이 아마 학원에서 만들어 주지 않았을까 라는 생각이 들었다
대회가 끝나고
아쉽다!